
Automatyzacja i robotyzacja
 12
12
 7
7
 3
3
12
7
3
Technologia
1 r
51

Dżem dobry.
Dziś chciałem zamienić kilka słów na temat automatyzacji i robotyzacji, czy zajmowałem się kilkanaście lat. Ogólnie nadal się tym zajmuję, ale w nieco inny sposób (głównie pod kątem bezpieczeństwa).
Nie chcemy robić tu doktoratu, będe więc opowiadać o rzeczach, które dla wielu z Was być może są oczywiste, ale mam nadzieję, że część społeczności uzna to za przydatne.
PS: wszystkie zdjęcia / filmy pochodzą z własnych realizacji.
Automatyzacja i robotyzacja w pewnym uproszczeniu służą nam do kilku celów:
- poprawy wydajności,
- poprawy jakości / dokładności,
- poprawy bezpieczeństwa (zastąpienie człowieka robotym przy niebezpiecznym procesie),
- uniezależnieniem się od czynnika ludzkie (chory, złamana noga, zwolnił się, zapił, ktoś zmarł, przestał odbierać telefon, itd.),
- i trochę innych.
Czas na kilka słów o sterowaniu.
Dziś chciałem zamienić kilka słów na temat automatyzacji i robotyzacji, czy zajmowałem się kilkanaście lat. Ogólnie nadal się tym zajmuję, ale w nieco inny sposób (głównie pod kątem bezpieczeństwa).
Nie chcemy robić tu doktoratu, będe więc opowiadać o rzeczach, które dla wielu z Was być może są oczywiste, ale mam nadzieję, że część społeczności uzna to za przydatne.
PS: wszystkie zdjęcia / filmy pochodzą z własnych realizacji.
Automatyzacja i robotyzacja w pewnym uproszczeniu służą nam do kilku celów:
- poprawy wydajności,
- poprawy jakości / dokładności,
- poprawy bezpieczeństwa (zastąpienie człowieka robotym przy niebezpiecznym procesie),
- uniezależnieniem się od czynnika ludzkie (chory, złamana noga, zwolnił się, zapił, ktoś zmarł, przestał odbierać telefon, itd.),
- i trochę innych.
Czas na kilka słów o sterowaniu.
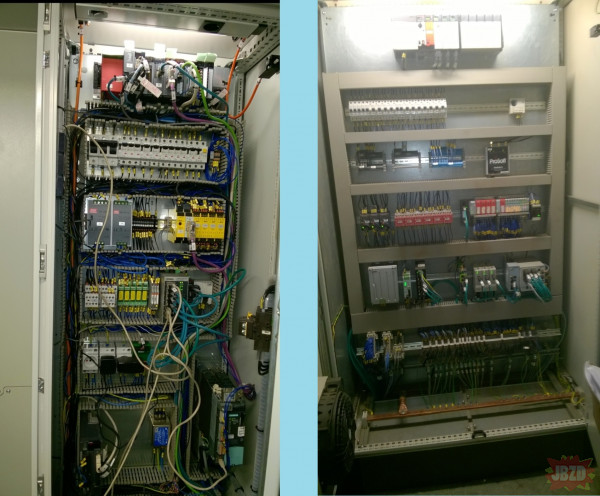
Powyżej widzmy 2 rozdzielnice.
Rozdzielnica po lewej (jeszcze w trakcie prac, finalnie okazała się za mała, gdyż klient pod koniec dodał kilka nowych funkcjonalności) postawiona na sterowniku serii Q firmy Mitsubishi - do których osobiście nie zapałałem miłością. Dodatkowo znajdują się tam moduły do sterowania robotem (będzie zdjęcie dalej) oraz serwem (mniejsza przetwornica na dole, po lewej). Safety postawione na sterowniku FlexiSoft Sicka.
Rozdzielnica po prawej to inna półka. Była to jedna z 6 części do sporej linii produkcyjnej (7 robotów) dedykowanej na rynek USA. Ponieważ miała wstępnie pracować w Polsce, cały projekt tworzono w zgodzie z normami amerykańskimi (UL, OSHA, NFPA, itd.), ale normy europejskie nadal w najważniejszych miejscach miały być spełnione. Dotyczyło się to całej linii, nie tylko rozdzielnicy.
Ta została postawiona na bardzo mocnym już Control GuardLogic'u rirmy Rockwell, który posiada safety na pokładzie i nie był potrzebny dodatkowy kontroler.
Rozdzielnica po lewej (jeszcze w trakcie prac, finalnie okazała się za mała, gdyż klient pod koniec dodał kilka nowych funkcjonalności) postawiona na sterowniku serii Q firmy Mitsubishi - do których osobiście nie zapałałem miłością. Dodatkowo znajdują się tam moduły do sterowania robotem (będzie zdjęcie dalej) oraz serwem (mniejsza przetwornica na dole, po lewej). Safety postawione na sterowniku FlexiSoft Sicka.
Rozdzielnica po prawej to inna półka. Była to jedna z 6 części do sporej linii produkcyjnej (7 robotów) dedykowanej na rynek USA. Ponieważ miała wstępnie pracować w Polsce, cały projekt tworzono w zgodzie z normami amerykańskimi (UL, OSHA, NFPA, itd.), ale normy europejskie nadal w najważniejszych miejscach miały być spełnione. Dotyczyło się to całej linii, nie tylko rozdzielnicy.
Ta została postawiona na bardzo mocnym już Control GuardLogic'u rirmy Rockwell, który posiada safety na pokładzie i nie był potrzebny dodatkowy kontroler.

Powyżej ostatnia rozdzielnica mojego projektu. Ponieważ tworzyłem głównie maszyny i linii prototypowe, zwykle starałem się zachowywać min. 50% wolnego miejsca, aby po "końcowych życzeniach" klientów pozostawało chociaż 20%...
Rozdzielnica praktycznie w całości postawiona na Siemensie, w tym przypadku kontroler S7-1500FS (FS - fail safe - czyli odporny na błędy = z safety na pokładzie) mamy w wersji obudowy ET200sp. Już dość mocny sprzęt, możliwa komunikacja w trybie izochronicznym np. z serwami - na dole po lewej własnie przetwornica od serwa V90. Brak złączek żółto-zielonych - wszystkie uziemienia (poza dedykowanymi do przetwornic) uchwtycone na wspólnej szynie miedzianej PE na dole rozdzielnicy - pozwala to na pozbycie się zakłóceniowych pętli prądów płynacych między złączkami PE.
Ponadto wydzielenie stref EMC (elementy na napięcia zmienne po lewej stronie, ich przewody lewe koryto, elementy sterownicze, komunikacyjne i safety po prawej i ich przewody w prawym korycie), dostosowanie się montażowo do wytycznych producentów danych komponentów + kilka innch rzeczy często jest wystarczające, aby udowodnić zgodność z dyrektywą EMC (kompatybilności elektromagnetycznej).
Czas na jakąś maszynę.
Rozdzielnica praktycznie w całości postawiona na Siemensie, w tym przypadku kontroler S7-1500FS (FS - fail safe - czyli odporny na błędy = z safety na pokładzie) mamy w wersji obudowy ET200sp. Już dość mocny sprzęt, możliwa komunikacja w trybie izochronicznym np. z serwami - na dole po lewej własnie przetwornica od serwa V90. Brak złączek żółto-zielonych - wszystkie uziemienia (poza dedykowanymi do przetwornic) uchwtycone na wspólnej szynie miedzianej PE na dole rozdzielnicy - pozwala to na pozbycie się zakłóceniowych pętli prądów płynacych między złączkami PE.
Ponadto wydzielenie stref EMC (elementy na napięcia zmienne po lewej stronie, ich przewody lewe koryto, elementy sterownicze, komunikacyjne i safety po prawej i ich przewody w prawym korycie), dostosowanie się montażowo do wytycznych producentów danych komponentów + kilka innch rzeczy często jest wystarczające, aby udowodnić zgodność z dyrektywą EMC (kompatybilności elektromagnetycznej).
Czas na jakąś maszynę.
Powyżej widzimy próby części maszyny, służącej do podnoszenia worków z zasobnika, otwierania jego wentyla, poprawiania tego otwarcia dedykowanym czarnym dildem ;) i przejazdu do miejsca załadunku gładzią szpachlową.
Stanowisko miało kilkadziesiąt siłowników, ciekawe sekwencje, prawie 200 czujników, złożone układy podtrzymujące siłowniki, trudne safety. Realizacja na S7-1200, panel 6 cali, kolor + sterownik safety Flexi Soft.
Dobra, pora na roboty.
Stanowisko miało kilkadziesiąt siłowników, ciekawe sekwencje, prawie 200 czujników, złożone układy podtrzymujące siłowniki, trudne safety. Realizacja na S7-1200, panel 6 cali, kolor + sterownik safety Flexi Soft.
Dobra, pora na roboty.
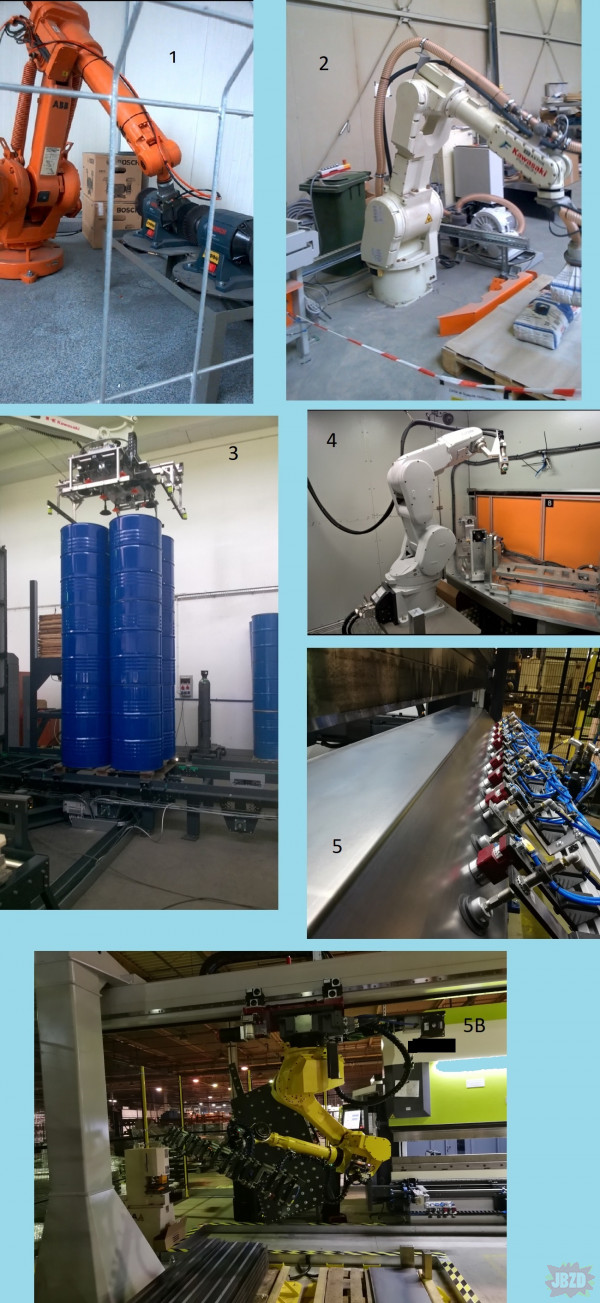
Roboty można wykorzystywać w niemal każdej gałęzi przemysłu i pomysłu.
1 - od bardzo prostych, zwykłe szlifowanie / gratowanie,
2 - przez niezwykle częste paletyzacje, np. worków,
3 - lub bardziej skomplikowaną paletyzację kilku rodzajów beczek (robot 150 kg udźwigu, na 2.5-metrowym postumecie z tytułowego zdjęcia),
4 - przez mega precyzyjne sczepianie laserowe raili do samochodów, namierzanie miejsc sczepiania systemami wizyjnymi (tu robot Mitsubishi, ten od wcześniejszej rozdzielnicy), gdzie dodatkowymi osiami były 4 obrotniki na stole obrotowym (po 2 na stronę),
5, 5B - po wyręczanie ludzi z gięcia detali np. na prasach krawędziowych, które to należą do maszyn szczególnie niebezpiecznych - są wymienione w załączniku IV dyrektywy maszynowej. Tu ciekawy przypadek robota podwieszonego do góry "nóżkami" na torze jezdnym - dodatkowa oś robota.
...i wiele, wiele innych.
1 - od bardzo prostych, zwykłe szlifowanie / gratowanie,
2 - przez niezwykle częste paletyzacje, np. worków,
3 - lub bardziej skomplikowaną paletyzację kilku rodzajów beczek (robot 150 kg udźwigu, na 2.5-metrowym postumecie z tytułowego zdjęcia),
4 - przez mega precyzyjne sczepianie laserowe raili do samochodów, namierzanie miejsc sczepiania systemami wizyjnymi (tu robot Mitsubishi, ten od wcześniejszej rozdzielnicy), gdzie dodatkowymi osiami były 4 obrotniki na stole obrotowym (po 2 na stronę),
5, 5B - po wyręczanie ludzi z gięcia detali np. na prasach krawędziowych, które to należą do maszyn szczególnie niebezpiecznych - są wymienione w załączniku IV dyrektywy maszynowej. Tu ciekawy przypadek robota podwieszonego do góry "nóżkami" na torze jezdnym - dodatkowa oś robota.
...i wiele, wiele innych.

Równie ważna, jak samo działanie, jest diagnostyka maszyny.
Do pasji doprowadzało mnie, jeżeli nie mogłem uruchomić jakiejś maszyny i za cholerę nie było wiadomo dlaczego ><
Na powyższych screenach moja wizualizacja, panele 12" Siemensa - zdaje się, że Comfort, ale mógł to też być Basic.
Już na ekranie głównym pojawiała się informacja o błędzie danego komponentu (np. podwieszony robot lub prasa). Po naciśnięciu na wykrzyknik robota utrzymanie ruchu było przenoszone do ekranu wskazującego błąd - w tym przypadku - utrata komunikacji sieciowej dla robota (na potrzeby testu i demonstracji wypiąłem przewód profinetowy ze switcha).
Wycięte loga firmy.
Do pasji doprowadzało mnie, jeżeli nie mogłem uruchomić jakiejś maszyny i za cholerę nie było wiadomo dlaczego ><
Na powyższych screenach moja wizualizacja, panele 12" Siemensa - zdaje się, że Comfort, ale mógł to też być Basic.
Już na ekranie głównym pojawiała się informacja o błędzie danego komponentu (np. podwieszony robot lub prasa). Po naciśnięciu na wykrzyknik robota utrzymanie ruchu było przenoszone do ekranu wskazującego błąd - w tym przypadku - utrata komunikacji sieciowej dla robota (na potrzeby testu i demonstracji wypiąłem przewód profinetowy ze switcha).
Wycięte loga firmy.
Z ciekawych funkcjonalności robotów mogę na szybko przytoczyć 2:
1. Podawanie sobie detali w locie, funkcjonalna, fajna i często atrakcyjna wizualnie sprawa.
2. Wymianę chwytaków - niestety, ten film wywaliło mi chyba ze 3 razy i się poddaję. Było na nim pokazane, jak robot przenosi detal, montuje w gnieździe, następnie zmienia chwyta na TIG i spawa (elektrodą cienka blachę). Jak ktoś dotrwał i chce zobaczyć o co chodzi, można wygoglować "schunk sws change tool / gripper" i cieszyć się wieloma filmikami.
Wymiana chwytaków jest świetną sprawą z dwóch powodów:
1. Pozwala zdecydowanie rozszerzyć / całkowicie zmienić funkcjonalność robota.
2. Pozwala projektować prostsze, lecz wymienne chwytaki, bo w przemyśle często mamy do czynienia z niezwykle skomplikowanymi gripperami.
Z wad - tracimy czas na wymianę chwytaka i potrzebujemy dodatkowej przestrzeni odkładczej.
1. Podawanie sobie detali w locie, funkcjonalna, fajna i często atrakcyjna wizualnie sprawa.
2. Wymianę chwytaków - niestety, ten film wywaliło mi chyba ze 3 razy i się poddaję. Było na nim pokazane, jak robot przenosi detal, montuje w gnieździe, następnie zmienia chwyta na TIG i spawa (elektrodą cienka blachę). Jak ktoś dotrwał i chce zobaczyć o co chodzi, można wygoglować "schunk sws change tool / gripper" i cieszyć się wieloma filmikami.
Wymiana chwytaków jest świetną sprawą z dwóch powodów:
1. Pozwala zdecydowanie rozszerzyć / całkowicie zmienić funkcjonalność robota.
2. Pozwala projektować prostsze, lecz wymienne chwytaki, bo w przemyśle często mamy do czynienia z niezwykle skomplikowanymi gripperami.
Z wad - tracimy czas na wymianę chwytaka i potrzebujemy dodatkowej przestrzeni odkładczej.

Nie mógłbym nie wspomnieć o robotach kolaboracyjnych. Są to roboty o zgoła innej budowie (na zdjęciu Fanuc CRX), które mogą - w restrykcyjnych warunkach - pracować bezposrednio z człowiekiem. Niestety, trzeba sporo zrobić, aby na taką pracę wydać zgodę i bardzo często okazuje się, że brakuje takim stanowiskom odpowiednich badań. Sam fakt, ze te roboty nie mają ostrych krawędzi, zatrzymują się po dotknięciu (przy prawidłowej konfiguracji) to jeszcze trochę za mało. Ultra ciekawostką są takie roboty przemieszczające się np. na samojezdny wózkach AGV, gdzie mogą w jednym miejscu zakładu robić jedną funkcję, przejechać 500m, zmienić chwytak i w innym robić coś zupełnie innego.

A na koniec hamiwde, bo i tak, chociaż dałem z siebie 30%, to ten predator jest ciekawszy niż wszystko, co Wam pookazałem.
Znaleziony w jednej z firm, zrobiony głównie z łańcuchów i złomu, wysoki na nieco ponad 2 metry, sprawił, że kiedyś kopara mocno mi opadła.
Wypierdalam.
Znaleziony w jednej z firm, zrobiony głównie z łańcuchów i złomu, wysoki na nieco ponad 2 metry, sprawił, że kiedyś kopara mocno mi opadła.
Wypierdalam.





